長岡技術科学大学 宮崎研究室
研究室の紹介
宮崎研究室ではメカトロニクス関連の研究を主に行っています。メカトロニクスとは機械要素(メカニクス)と電気要素(エレクトロニクス)が融合しているものであり,制御工学の分野になります。
たとえばロボットアームならアーム部の運動は機械要素の解析が必要で,それを動かすモータには電気要素の解析が必要,ということです。
そんな電気も機械も両方勉強できる(しなければならない)のが我が宮崎研究室です。
研究テーマ
-
二関節筋を再現したロボットアームの位置および力制御
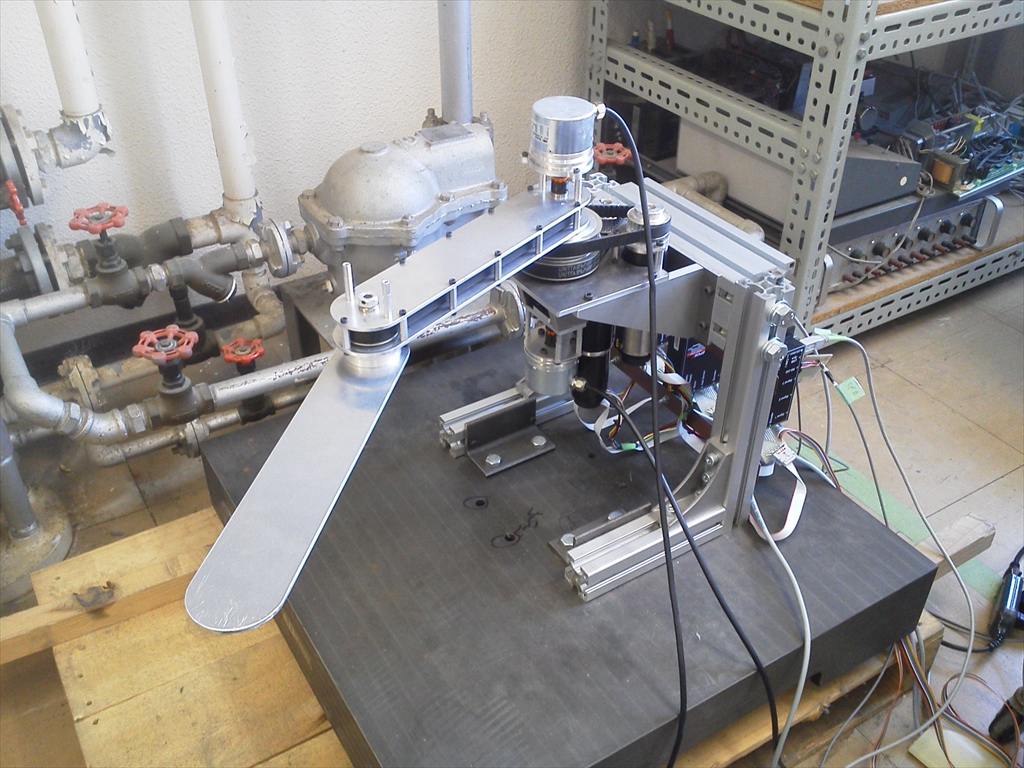 二関節筋を再現したロボットアーム
二関節筋を再現したロボットアーム
人間の腕や足には二関節筋と呼ばれる二つの関節を同時に動作させる筋肉があります。 この筋肉があるおかげで人は手先や足先に発生する力を制御することが出来ています。 この二関節筋をロボットアームで再現することで人間と同じような力制御を目指しています。 写真のアームは二関節筋を再現するために3つのモータで2関節を動作させます。 そのため従来のアームの制御法では制御が困難になり,二関節筋を再現したロボットアーム用の新しい制御法が必要になっています。
-
手押し式電動運搬機の制御

現在使用されている手押し式の運搬車はエンジン駆動方式を採用しているものが多いですが、エンジンのその特性上、制御が難しく、思い通りに動かしづらいという特徴があります。 そこで、エンジンをモータに置き換えた電動駆動方式の運搬車の研究をしています。 この電動運搬車は、ただモータが搭載されているだけでなく、人間の押した力に反応して駆動トルクを出力するパワーアシスト走行を行うことができます。 これにより、人間はとても軽い力で重い荷物を運搬することができます。 その他にも、泥道などのすべりやすい路面でのスリップを抑制するアンチスリップ制御や障害物を回避するのを手助けする障害物回避アシスト制御などの研究を行っています。
-
多慣性共振系の制振制御・オンラインモデル同定に関する研究
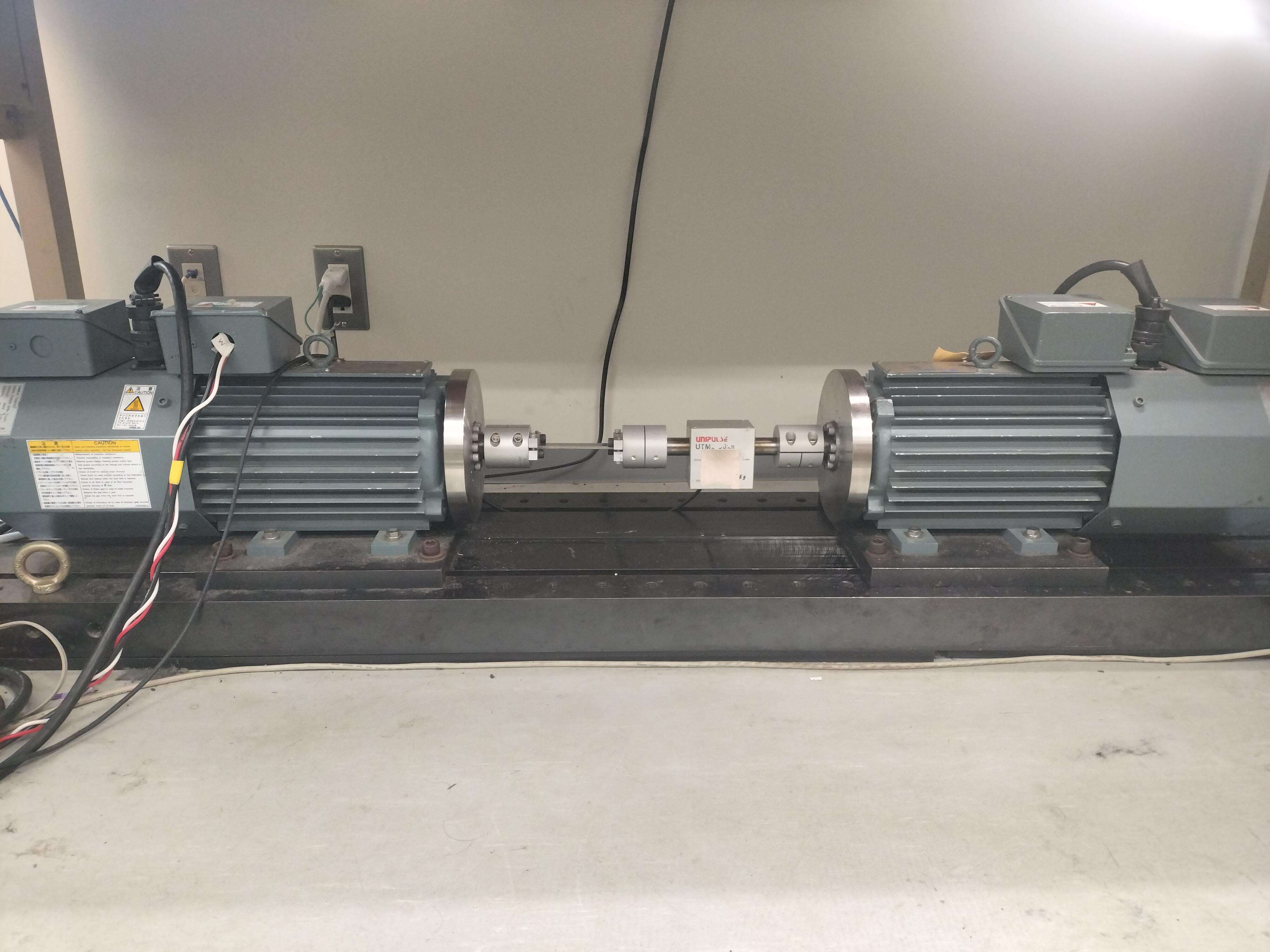
産業用装置では、モータの駆動力をシャフト等を介して負荷に伝える際、共振現象が生じ振動が増幅されることで、装置の寿命低下や故障の原因となります。 これを防ぐために制振制御手法が数多く提案されていますが、制御効果を最大限に引き出すには装置の正確なモデル化が不可欠です。 本研究室では、シャフトのねじれ要素を対象としたモデルのオンライン同定に取り組んでおり、長時間運転や温度変化によるパラメータ変動に対応しつつ、振動を増幅させることなく同定を行う研究をしています。
-
速度エンコーダを用いた力制御に関する研究

近年、人間とロボットが共に作業する協働型ロボットが注目されています。人間と近い距離で作業をするため、ロボットは人間にとって危険のないような動作をする必要があります。 そこで、ロボットが対象物や人間に対して与える「力」を制御することで、人間に優しいロボットの実現を目指しています。 宮崎研究室では、位置と速度の同時取得が可能なエンコーダを用いて力制御を行うことで、トルクセンサの分解能にかかわらず精密な力制御が出来るような制御技術について研究を行っています。
-
産業用多関節ロボットの軌跡追従制御に関する研究
 産業用多関節ロボット
産業用多関節ロボット
垂直多関節型の産業用ロボットは工場や倉庫といった様々な産業の現場で利用されています。 このようなロボットにおいて搬送や製品の組み立てといった作業に用いる場合には始点と終点を指令するP2P制御が使用されます。 一方で溶接やレーザーカットなどといった作業の場合には途中経路も指令するCP制御が用いられます。 これらのタスクにおける要求は年々高水準なものになっており、より小さな作業を高速に行うことが求められています。 現在は小サイズの軌跡に対して高速、高精度な追従を行うための制御手法についての研究を行っています。