Representative
Graduate School of Technology Management, Department of System Safety, Safety Certification

Professor Takanori Miyoshi
【Comment】 Creating stuff you've never seen before!
【Room】Nuclear Safety and System Safety Building 614

Research Overview
Tactile sensor robot project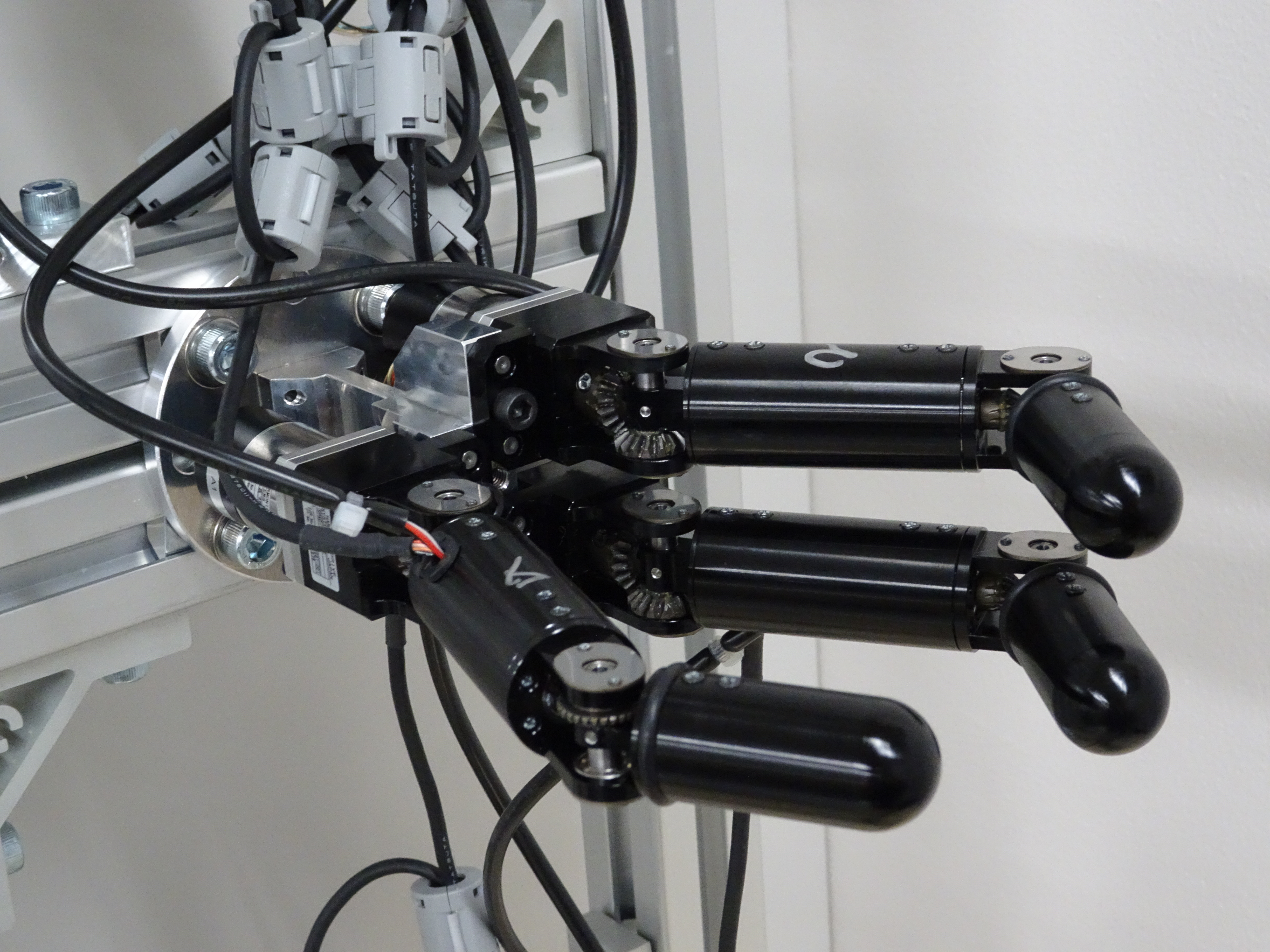 |
This research focuses on the development of a force control robot by joining a soft sensor and a robot that can approach fragile/soft objects like bread, dough or people. The previously mentioned soft sensor is made from a pressure-sensitive conductive rubber (elastomer) and can be set in curved surfaces and, because of its 0.5mm thickness, can also be used as an "E-skin" for the robot's outer surface. Nevertheless, it also has a couple of problems. The first one is related to repeating-identical loads that, when applied to the sensor, the sensor response doesn't match that of the load. On the other hand, if a constant force is applied to the robot, the sensor's value changes constantly at a minimum rate. It is necessary to consider and if possible solve these problems in order to apply this e-skin into real robots. In this project the wide field of study include sensors, circuits and robot control. In other words, the field of study in this project contains the whole robotics system. The project is being implemented in three research laboratories inside this university while also collaborating with the Inabagomu Company and Osaka University. |
|---|---|
Kagome Project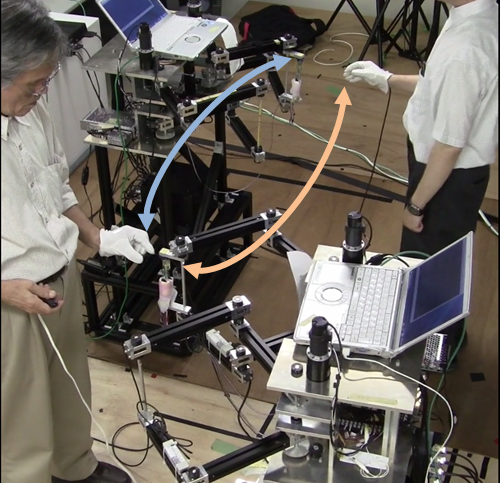 |
Research is being realized on a robot that can transmit human movements to places far from the person realizing them. The haptic information like the softness of an object, its weight and the movement it realizes will be transmitted through the robot. We can add this to the current visual and auditive communication methods in order to get a communication method that has never been seen before. Besides entertainment, this type of communication to be used to realize tasks realized in dangerous environments or in the medicine field. The problem regarding this research is instability created from communication lag between the robots, and is currently needed to be suppressed. Right now, research is being done in 1-on-1 robot communication environment, but because in the future it is planned to become a communication system connecting one robot to multiple robots, a much more stable system's architecture is needed. |
Forceps Mouse |
Because of the widespread of the internet, we have become able to transmit messages, audio, images and video to places far from us in a very short time. Currently the most utilized senses in these communications are seeing and hearing, while smell, touch and taste are tossed aside, so research regarding the development of a communication method that adds haptic information to the visual and auditive information is being realized. Force information is transmitted when objects or humans come in contact with each other. To build a communication architecture able to transmit haptic information through the internet, an environment made from both hardware and software which mediates between the target person and object in which haptic information is being transmitted. For the hardware, a haptic signaling device for a mouse is being researched, and as the software, a soccer game that transmits haptic information while you control the player is being developed. |
Circular Robot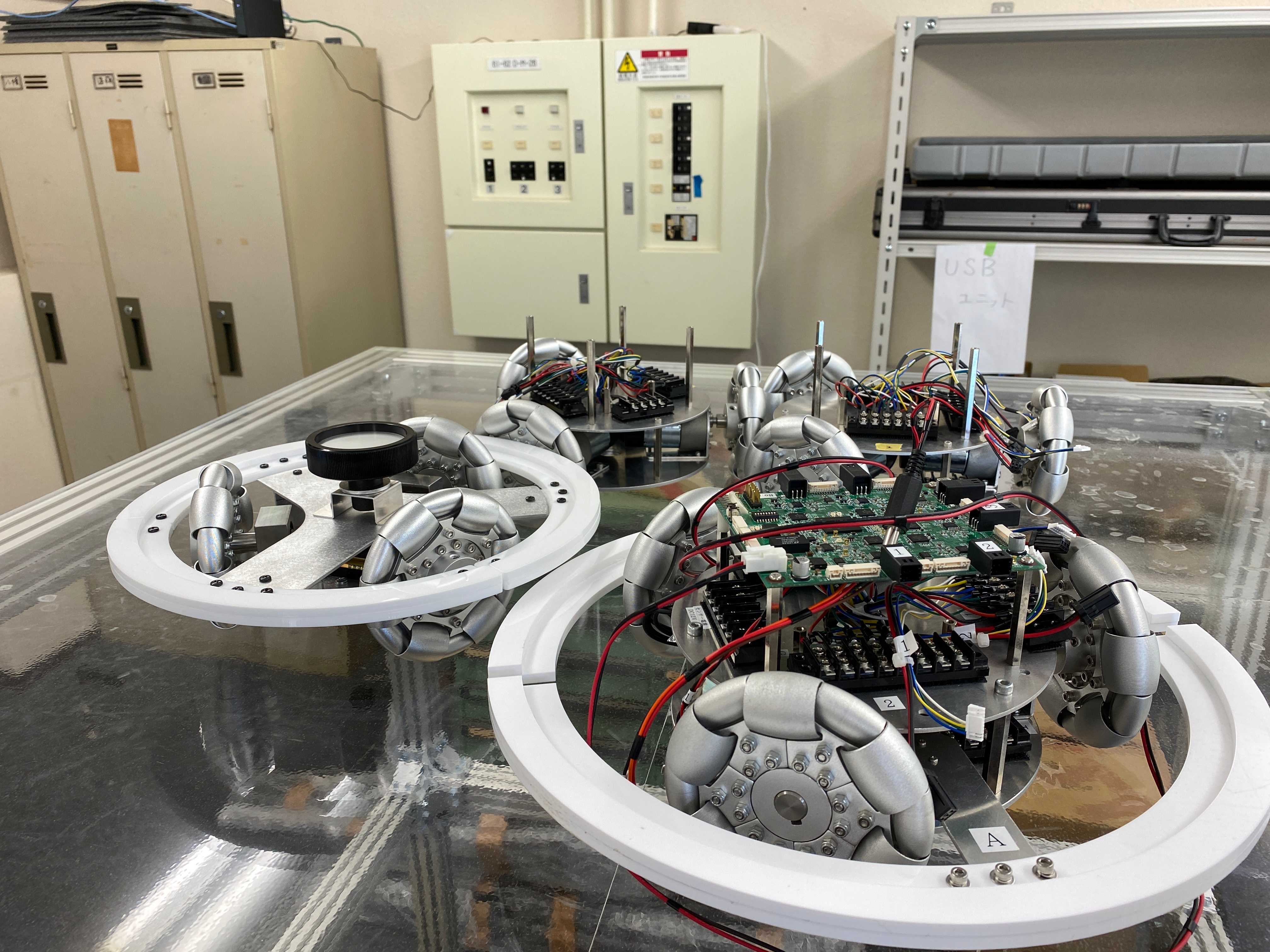 |
This research has the objective of stabilizing a circular robot with multilateral control. In order to do this research, two people in faraway places from each other and are going to match the forces they apply through this robot. For this to be realized, a bilateral control environment is going to be constructed. Then, when the bilateral control is finished, development of multi-lateral control that 3 persons A, B and C, while being afar from each other will have matching forces between each other through the robot system. The purpose of this research is to create and stabilize the environment for this multilateral control for 3 points. |
Franka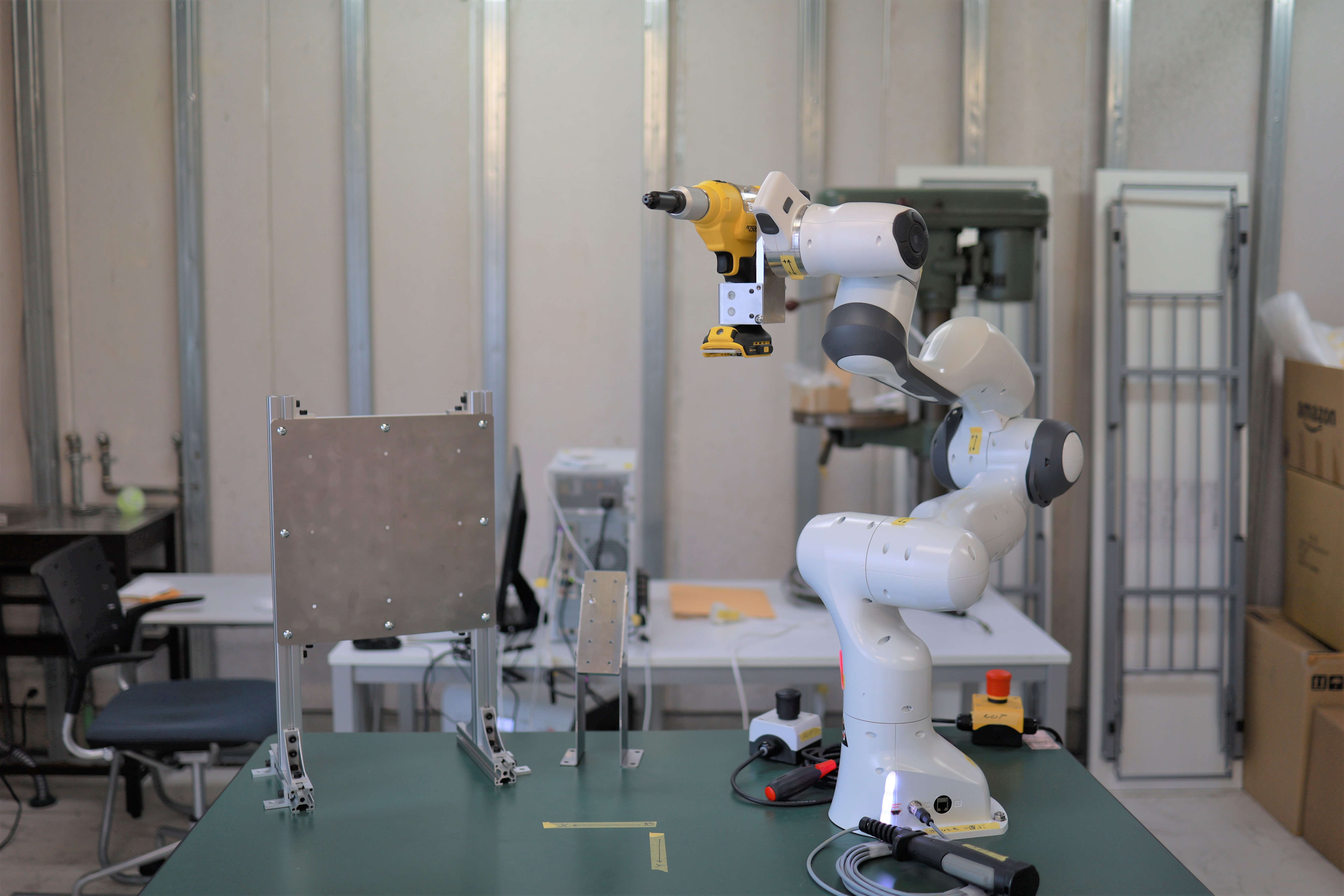 |
The Franka Emika robot arm being utilized in these research topics is a 7-joint arm that can realize complicated movements like human hands. Our objectives with this robotic arm are the automation of a product's creation tasks and to use it in the manipulation of objects that are far away from us. In the case of the automation problem, the task board can change shape and have the layout be completely different, plus the robot won’t receive the objects for assembly organized. So, the algorithm requires objects to be clearly recognized and, most importantly, a highly adaptable algorithm. In order to recognize the objects image processing will be utilized and the robot needs to not have any pre-decided movement and be able to adapt to the current situation the assembly process is in. For the far away object manipulation problem, there is apparent communication lag in the controller data and in the video that informs you about the current state of the robot, adding to the lag from the same controllers' processing time. Furthermore, having only one video to see the robots doesn't give you depth of field and realizing the desired movements is very hard under these conditions. To solve this problem, the data processing will be sped up and stereoscopic vision will help in order to help in the remote object manipulation. |
Remote Rehabilitation Robot |
The creation of a 2-link rehabilitation robot that uses a distance control system is being done in this laboratory. Due to the aging of the population, more and more people need nursing care. Furthermore, the high load on hospital visits and the lack of caretakers makes rehabilitation much more difficult to obtain. My research theme focuses on this topic, developing a robot that enables people to take nursing and rehabilitation without needing to leave their homes. And the reason that this robot is currently possible is because of the so-called position and force feedback bilateral remote control. This control exchanges position and control, which can make the patient feel that they are being handled by a real nurse. |