代表者
大学院技術経営研究科 システム安全専攻 安全認証講座

三好 孝典(みよし たかのり) 教授
【一言コメント】 世の中にないものを作る
【居室】原子力安全・システム安全棟 614


横田 和哉(よこた かずや) 助教授

研究概要
触覚センサロボットproject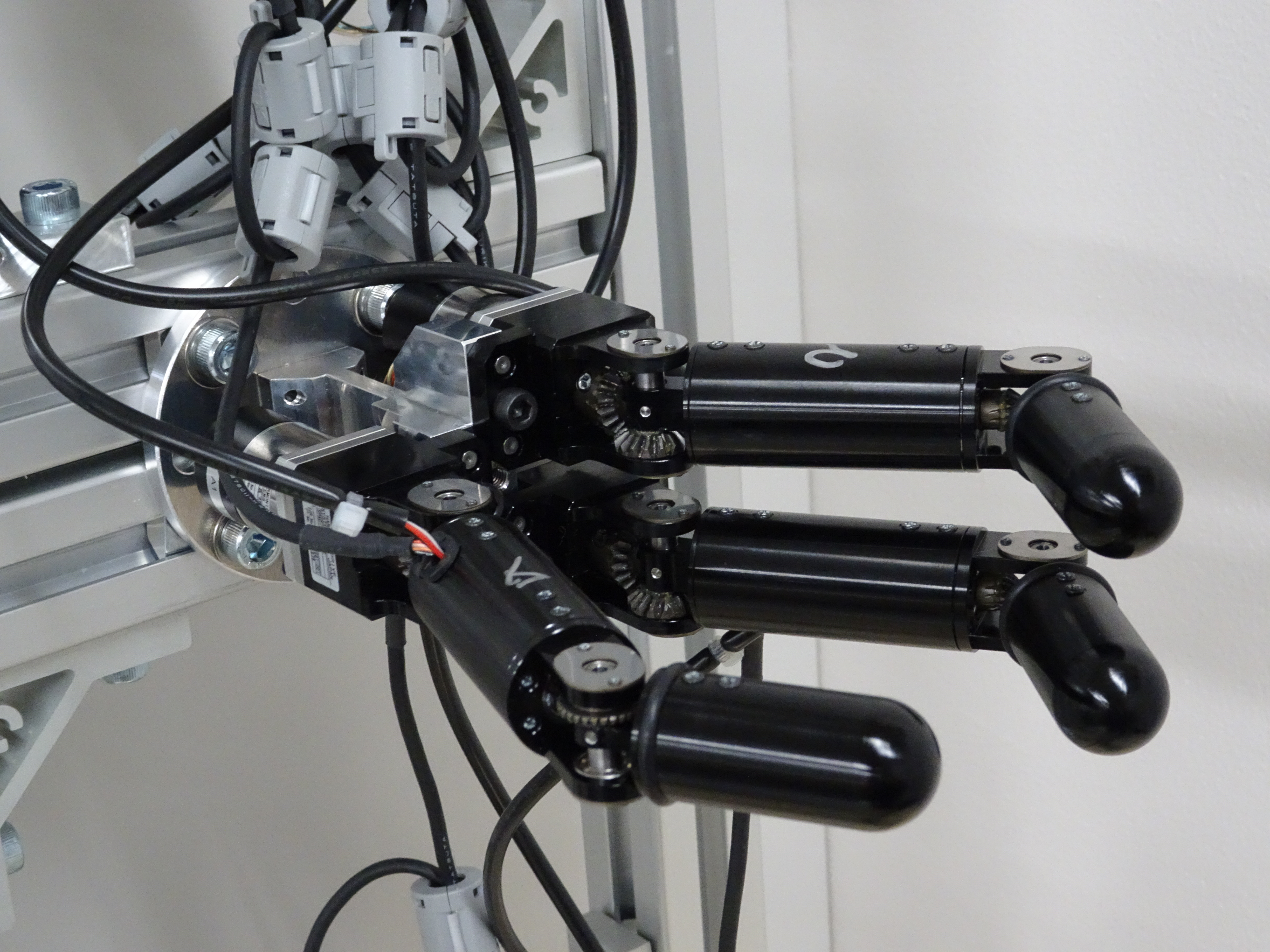 |
柔らかいセンサとロボットを組み合わせて、パン生地や粘土といった形状が壊れやすい物体や人にアプローチできる力制御ロボットの開発を行っています。 柔らかいセンサとして感圧導電性ゴム(エラストマー)を使用します。この柔らかい感圧センサのメリットは局面に張り付けることができることに加え、厚みが0.5㎜であることからロボット外装表面に張り付けてロボットにとってのE-Skin(皮膚)として使用することができます。 ここで本センサの問題となっている点は、同一の繰り返し荷重を加える場合においてセンサからの応答が完全に一致しない・一定荷重を加え続ける場合にセンサの値が微小に変化し続けるといった特性を有していることです。この問題を解決、あるいは考慮しながらロボットに応用していく必要があります。 本プロジェクトではセンサ・電気回路・ロボット制御といった幅広い知識を獲得し、ロボットシステム全体を提案していく過程を学習することができます。本学では3つの研究室でこのプロジェクトを推進しており、また学外ではイナバゴム株式会社・大阪大学との共同研究を行っています。 |
|---|---|
かごめProject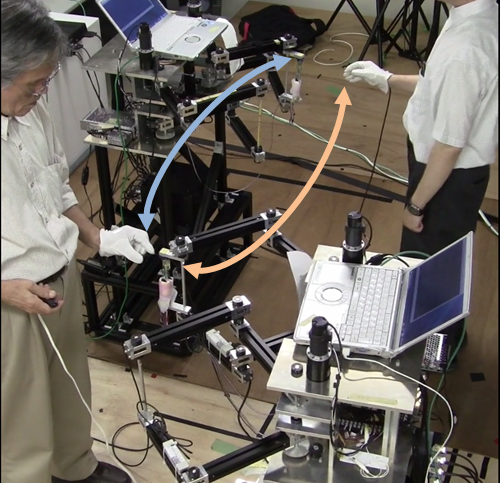 |
遠隔地間で人の動作を伝え合うロボットの研究をしています。 物体の柔らかさや重さ,動きなどの力覚情報をロボットを介して伝えることで,別地点の人が対応するロボットからその力覚情報を感じ取ることができます。これをSNSや音声通話などの聴覚情報と視覚情報を使う遠隔コミュニケーションと組み合わせることで遠隔地間でより臨場感のあるコミュニケーションがとれるようになります。 また,力覚情報を使用したコミュニケーションは危険な環境下での作業や医療分野などで活躍が見込めます。 本研究における主な課題はロボット同士の通信中に発生する通信遅延による不安定な挙動を抑制することにあります。現在は1対1の環境で研究を行っていますが,将来的には1対多数で行うことになるためより安定した通信を行うためのシステム構築が必要になります。 |
力覚マウス |
インターネットの普及により,私たちは文字,音声,映像などを用いて離れた場所にいる他者と簡単に短時間で情報を伝達できるようになりました。現在,これらのコミュニケーション手段は人間の有する五感の内の視覚や聴覚といった情報を用いるものが殆どであり,残りの触覚,味覚,嗅覚といった情報はいまだに幅広く流通しておらず,視聴覚情報に加えて力覚情報を用いたコミュニケーションに関する研究が活発に進められています。 力覚情報伝達は人や物が相互接触した際に相互干渉して双方の運動に影響を及ぼすことで生じ,インターネットを経由した遠隔地間での力覚を利用したコミュニケーション構築には,力覚情報伝達が生じる対象者および対象物間を媒介するハードウェアとソフトウェアの双方からの環境構築が必要となります。現在,本研究室では,ハードウェアとしてマウス型の力覚提示装置,ソフトウェアとしては力情報を用いて選手を操作するサッカーゲームの開発を行っています。 |
円形ロボット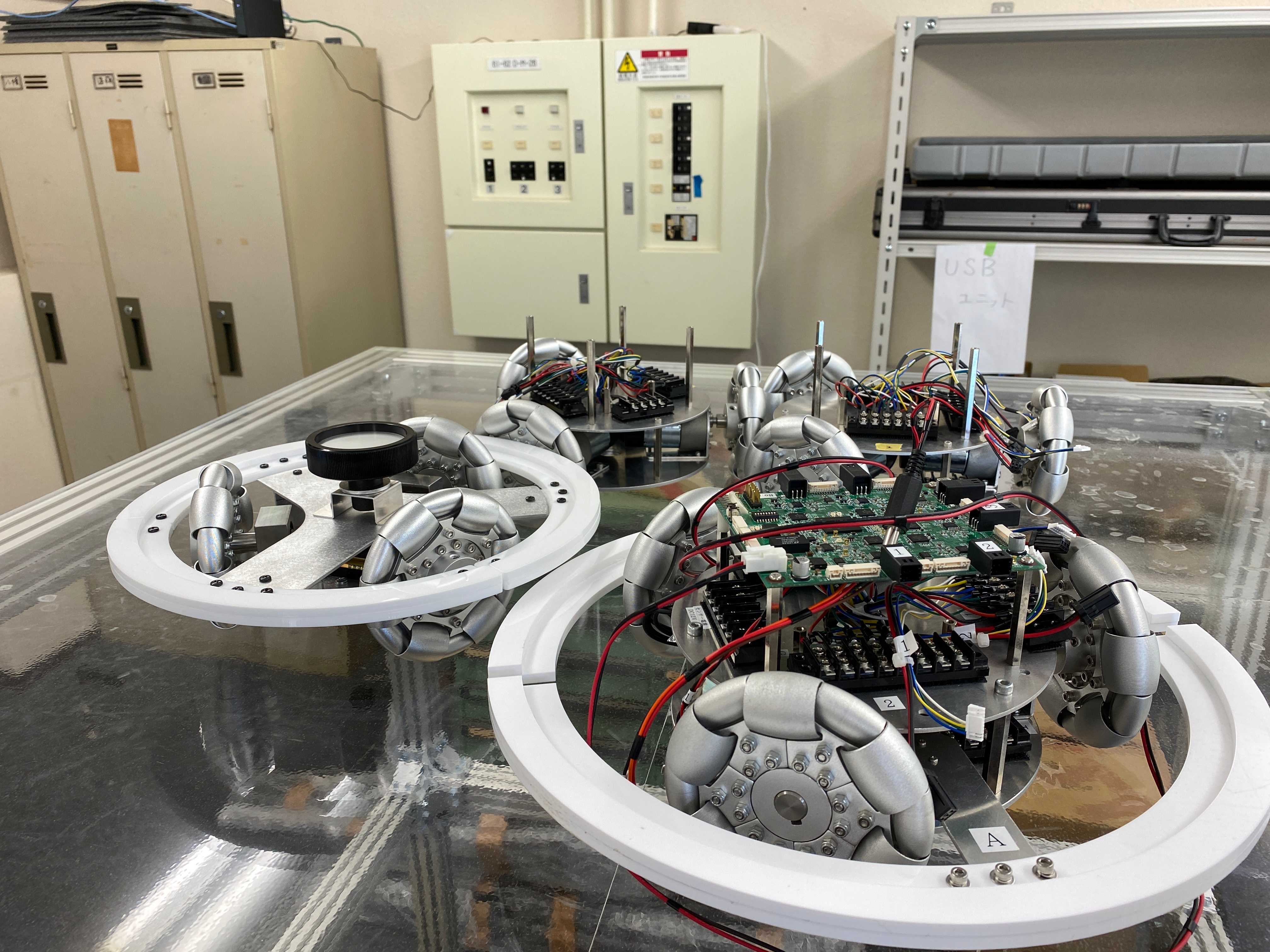 |
円形ロボットを用いたマルチラテラル制御の安定化を目標に研究を行っています。 そのために,まずはロボットを通して遠隔地間にいる二者が接触して力を及ぼしあっている状況下でお互いから受ける力が同一となる,バイラテラル制御を行うことが必要となるため,まずはバイラテラル制御環境の構築を行います。 その後,バイラテラル制御を発展させ,遠隔地間にいる三者A,B,Cがロボットを通してAB者間,AC者間,BC者間で力を及ぼしあっている状況下で,AがBから受ける力とBがAから受ける力,AがCから受ける力とCがAから受ける力,そしてBがCから受ける力とCがBから受ける力が同一となるようなマルチラテラル制御を行います。この3地点でのマルチラテラル制御を安定して行うことができる環境を構築することが本研究の目標です。 |
franka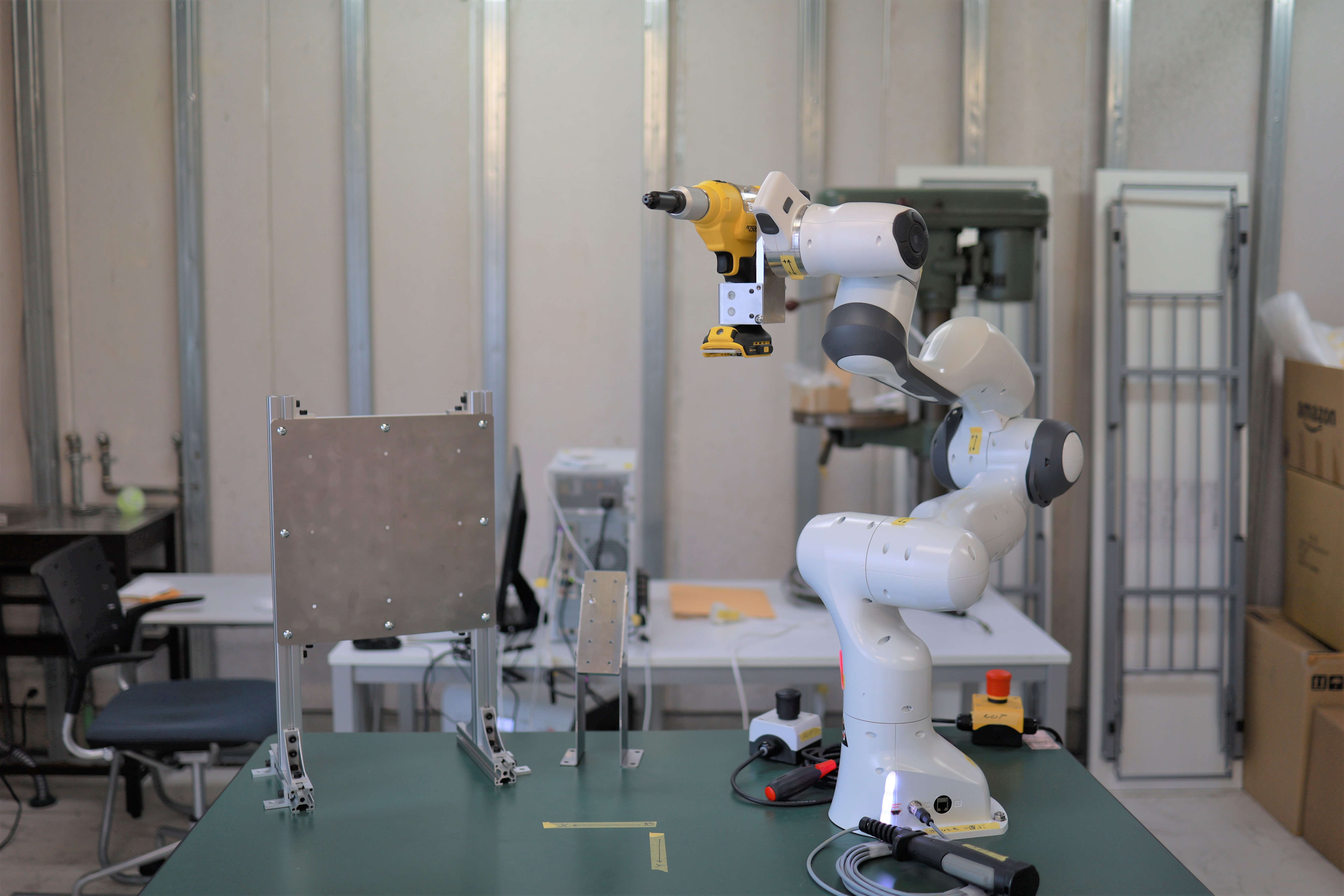 |
私たちの研究で扱っているfrankaは7つの軸を持つロボットアームで、人の手のように複雑な動きが可能です。私たちはこのfrankaを用いて、モノ作りといった作業の自動化や遠隔での操作に活用していくことを目的としています。 作業の自動化では物体を正確に検知し、正確にロボットアームを動かす必要があります。この課題を解決するために画像処理やコンピューター上でのシミュレーションを用いて正確に検知、動作させる方法を模索していきます。 遠隔での操作ですが、この時にコントローラーのデータやロボットの状態をみるビデオといった通信の遅延、コントローラーのデータを処理する遅延などロボットアームを動かそうとすると動作に遅れが生じてしまいます。また、ロボットを見る際に1つのビデオでは遠近感が分からず、想定した動作をすることが難しいです。この課題を解決するためにデータ処理の高速化や複数のビデオからロボットの状態を立体視で見るなど遠隔操作が容易になる方法を模索しています。 |
遠隔リハビリロボット |
2リンクアームのリハビリロボットを用いた遠隔制御系の構築を行っています。現在、高齢化に伴い要介護者が増える一方で、患者の通院の負担や、介護者の不足のため、継続的なリハビリが困難になっています。私の研究テーマはここに着目し、病院に通わずとも自宅でリハビリを行うことのできるロボットの開発を行っています。そしてこの遠隔リハビリを可能にするのが、位置・力帰還型バイラテラル遠隔制御と呼ばれる、位置と力を相互にやる取りすることで、実際に患者に触れているかのような感覚を得ることができるものです。 |